Tractrix 곡선
추적곡선의 수학적 이해
The Tractrix and Its Mathematical Properties
목차
1. Tractrix의 정의와 역사
2. 기하학적 성질
3. 미분방정식과 해
4. Catenary와의 관계
5. Circular Tractrix
6. 응용 사례
Tractrix의 정의
추적곡선 (Tractrix)
물체가 일정한 길이의 줄로 끌려갈 때 그리는 곡선
기하학적 특징
곡선 위의 한 점에서 그은 접선이 준선과 만나는 점까지의 거리가 항상 일정
어원과 역사
1670s
Claude Perrault이 처음 연구
1676
Christiaan Huygens가 방정식 유도
어원
라틴어 trahere (끌다)
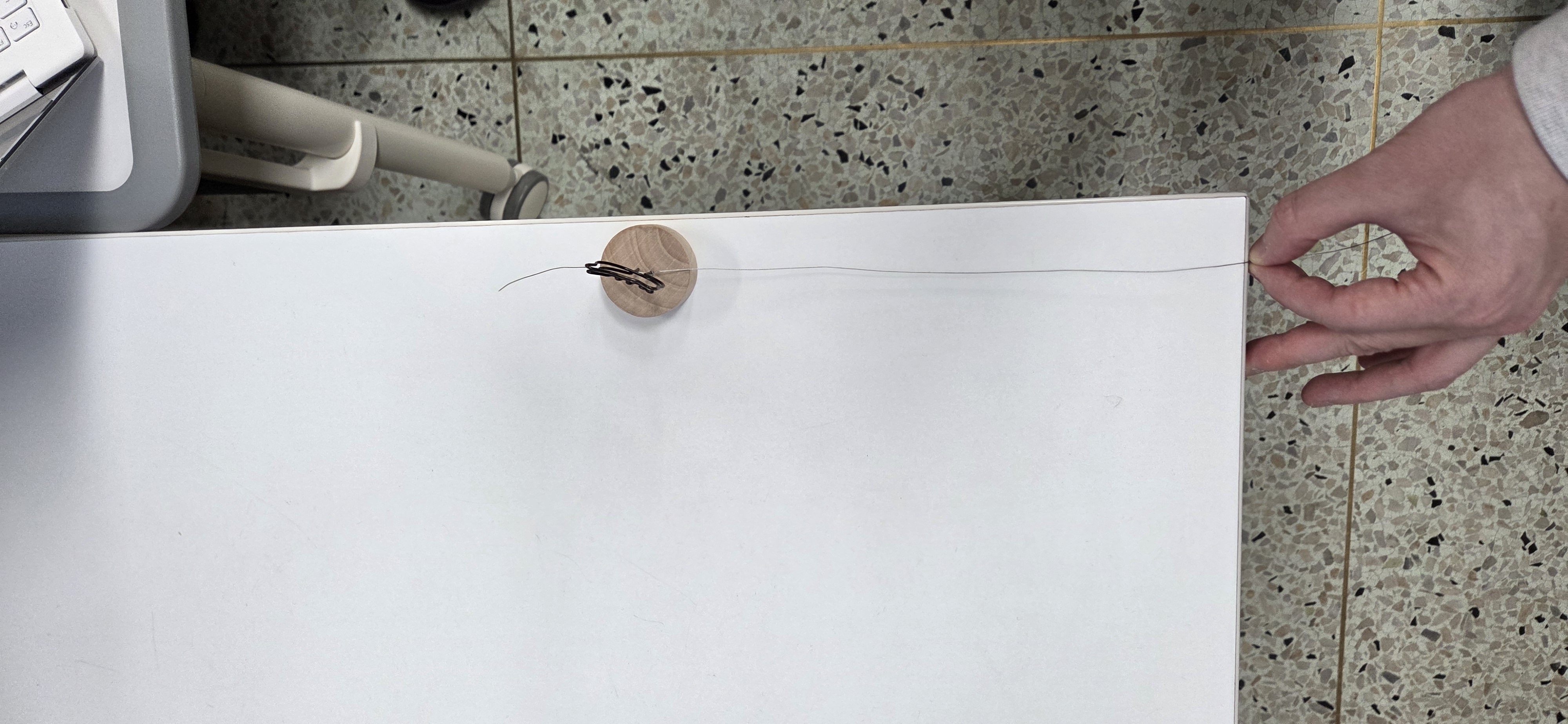
Tractrix 실험
준비물
- 지우개 (물체)
- 일정 길이의 실 (L)
- 책상 (평면)
실험 방법
1 실을 지우개에 고정
2 실의 다른 끝을 직선으로 이동
3 지우개의 궤적 관찰
실험 설정
📍 독립변인
끄는 점의 위치
손의 y축 좌표
줄의 길이 (L)
조작 가능한 변수
📊 종속변인
물체의 위치
지우개의 (x, y) 좌표
궤적의 형태
Tractrix 곡선
🔒 통제변인
줄의 장력 유지
항상 팽팽하게
끄는 경로
y축 방향 직선(책상 모서리에 손 대고 움직이기)
고정 관찰
화면이 흔들리지 않도록 일정하게 유지
마찰력, 공기저항
무시 (이상적 조건)
영상 속 물체의 운동 분석
오픈소스 Tracker로 x-t, y-t, x-y 그래프 그리기
촬영한 영상으로 물체의 움직임을 추적하기
'Tracker'란 무엇인가?
핵심 개념
- 무료 오픈소스 물리(OSP) 영상 분석 도구
- 동영상에서 물체의 운동을 정량적으로 측정
- 데이터 테이블, 그래프, 벡터 등 다양한 시각화 제공
학습 목표: 3가지 핵심 그래프 배치하기
- x-t 그래프: 시간에 따른 수평 위치
- y-t 그래프: 시간에 따른 수직 위치 (높이)
- x-y 그래프: 시간에 따른 운동 궤적
STEP 1: 영상 준비 및 기본 설정
- 영상 불러오기: 분석할 영상을 트래커 창으로 드래그 앤 드롭
- 분석 구간 설정: 하단 슬라이더로 물체가 움직이는 구간 선택
- 교정(Calibration): '교정 막대' 도구로 실제 길이 설정
- 좌표축 설정: '좌표축' 도구로 운동의 기준 원점 $(0,0)$ 지정
STEP 2: 물체 추적 (트랙 생성)
- 트랙 생성: 만들기 → 점 질량(Point Mass) 선택
- 수동 추적: Shift 키를 누른 채 프레임마다 물체의 중심 클릭
- 자동 추적: 물체-배경 대비가 뚜렷할 때 활용. 자동 추적 누르고 Ctrl+Shift를 누르고 클릭해 물체를 지정
STEP 3-1: $x-t$ 및 $y-t$ 그래프 배치
- 기본 표시: x-t 그래프 확인
- 그래프 추가: 그래프 창 우클릭 → 플롯 추가(혹은 분할)
- y-t 그래프 설정: 새 그래프 세로축 레이블('x') 클릭 → y(위치) 선택
STEP 3-2: $x-y$ 궤적 그래프 배치
- 새 플롯 추가: 그래프 창 우클릭 → 플롯 추가
- 세로축 설정: 세로축 레이블 클릭 → $y$(위치) 선택
- 가로축 설정: 가로축 레이블('$t$') 클릭 → $x$(위치) 선택
- 결과: 세로축($y$), 가로축($x$) 궤적 그래프 완성
분석 및 데이터 활용
- 결과: $x-t, y-t, x-y$ 그래프 동시 배치 완료
- 데이터 테이블: '테이블' 탭에서 $t, x, y, v$ 등 모든 수치 확인
- 데이터 활용: 복사 후 Excel/Google Sheets 등에서 2차 분석
Tracker 실습 화면 예시
$x-t, y-t, x-y$ 그래프와 메인 화면 구성 예시
기하학적 성질 (1)
접선 길이
곡선 위의 점 P에서 y축까지의 접선 길이가 항상 L로 일정
점근선
Tractrix는 y축에 점근적으로 접근 \((x \to 0\)일 때 \(y \to \infty)\)
기하학적 성질 (2)
대칭성
$y$축에 대해 대칭
원과의 관계
점 P에서의 접선은 중심이 $P$의 수직선 위에 있고 반경이 $L$인 원에도 접함
수학적 모델링 가정
1. 줄의 길이 $L$은 일정
2. 물체는 항상 줄이 당기는 방향(접선 방향)으로만 이동
3. 마찰력과 공기 저항 무시
4. 끄는 점은 직선(또는 원) 위를 이동
GeoGebra 실습
미분 방정식을 수치적으로 풀어 Tractrix 곡선 그리기
📐 단계별 구현
-
줄의 길이:
L = slider(1,10) -
변화량:
dx = slider(0.05, 0.1, 0.01) -
x좌표:
xn(x) = L - dx * x -
기울기:
f(x) = sqrt(L² - xn²)/xn(x) -
진행 정도:
N = slider(0,L/dx) -
y좌표 계산:
yn = sequence(sum(f(t)*dx,t,0,m-1),m,0,N) -
점 생성:
p = sequence((xn(n),yn(n)),n,0,N) -
선분 연결:
segment(p(n),p(n+1))
핵심 아이디어
미분방정식 \(\frac{dy}{dx} = \frac{\sqrt{L^2 - x^2}}{x}\)
→ 수치적분으로 근사
슬라이더 N을 조절하여 곡선이 그려지는 과정을 관찰
GeoGebra 시뮬레이션 결과
슬라이더를 움직이면 실시간으로 곡선이 그려지는 모습
미분방정식 유도 (1)
점 \(P(x, y)\)에서 y축까지의 접선 길이 = \(L\)
접선: \(Y - y = y'(X - x)\)
y축과의 교점 T: \((0, y - xy')\)
\(X = 0\)을 대입
미분방정식 유도 (2)
거리 \(PT = L\)
\(\sqrt{x^2 + (xy')^2} = L\)
\(x^2(1 + (y')^2) = L^2\)
미분방정식 유도 (3)
\(x^2(1 + (y')^2) = L^2\)
\((y')^2 = \frac{L^2 - x^2}{x^2}\)
\(y' = \pm\frac{\sqrt{L^2 - x^2}}{x}\)
미분방정식 해법
\(\frac{dy}{dx} = -\frac{\sqrt{L^2 - x^2}}{x}\)
아래쪽으로 감소하는 경우
변수 분리: \(dy = -\frac{\sqrt{L^2 - x^2}}{x} \cdot dx\)
치환: \(x = L \sin(t)\)
\(dx = L \cos(t) \, dt\)
매개변수 방정식 (1)
치환 후 적분
\(dy = -L \frac{\cos^2 t}{\sin t} \, dt\)
\(dy = -L \frac{1 - \sin^2 t}{\sin t} \, dt\)
매개변수 방정식 (2)
\(y = L \int (\csc t - \sin t) \, dt\)
\(y = L(\ln|\csc t - \cot t| + \cos t) + C\)
\(x(t) = L \sin(t)\)
\(y(t) = L\left(\ln\left(\cot\left(\frac{t}{2}\right)\right) - \cos(t)\right)\)
직교좌표 방정식
\(x = L \operatorname{sech}^{-1}\left(\frac{y}{L}\right) - \sqrt{L^2 - y^2}\)
또는
\(x = L \ln\left|\frac{L + \sqrt{L^2 - y^2}}{y}\right| - \sqrt{L^2 - y^2}\)
접선 성질
접선 길이의 일정성
\(PT = L\) (일정)
접선 기울기
\(\frac{dy}{dx} = -\frac{\sqrt{L^2 - x^2}}{x}\)
곡률 공식
\(\kappa = \frac{ds}{d\varphi}\)
\(R = \frac{y^2}{L}\)
곡률 반경
호장 공식
\(s = L \tan \theta\)
\(\theta\): 접선과 y축이 이루는 각
또는
\(s = L \ln\left(\tan\left(\frac{\theta}{2}\right)\right)\)
Catenary 소개
현수선 (Catenary)
양 끝이 고정된 무거운 줄이 중력에 의해 늘어진 곡선
Tractrix와의 관계
Tractrix는 Catenary의 involute
Catenary 방정식
\(y = a \cosh\left(\frac{x}{a}\right)\)
\(y = \frac{a}{2}\left(e^{x/a} + e^{-x/a}\right)\)
\(a\): 곡선의 형태를 결정하는 매개변수
Tractrix와 Catenary 관계 (1)
Involute 관계
Tractrix = Catenary의 involute
Catenary = Tractrix의 evolute
기하학적 의미
Catenary의 각 점에서 접선을 그어 일정 길이만큼 연장하면 Tractrix
Tractrix와 Catenary 관계 (2)
Catenary: \(y = a \sec \theta\)
Tractrix: \(s = a \tan \theta\)
매개변수 \(\theta\)를 통해 연결
\(\theta\): 접선과 수직선이 이루는 각
Involute 관계
Involute 정의
곡선 위의 각 점에서 접선을 따라 실을 풀어나갈 때, 실의 끝이 그리는 곡선
Evolute 정의
주어진 곡선의 모든 곡률 중심의 자취
넓이 공식
\(A = \int y \, dx\)
\(A = \frac{L^2}{2}\)
x축과 곡선 사이의 넓이
회전체 부피
\(V = \pi\int y^2 \, dx\)
x축 주위로 회전
\(V = \frac{2\pi}{3} L^3\)
회전체 표면적
\(S = 2\pi\int y \, ds\)
x축 주위로 회전
\(S = 2\pi L^2\)
Circular Tractrix 소개
정의
지시선(directrix)이 직선이 아닌 원인 경우의 Tractrix
특징
직선 Tractrix보다 더 복잡하고 다양한 패턴을 생성
Circular Tractrix 정의
지시선: 반지름 \(R\)인 원
줄의 길이: \(a\) (일정)
경우 1: \(a < R\) → 끌리는 경우
경우 2: \(a = R\) → 중심으로 나선
경우 3: \(a > R\) → 밀리는 경우 (Trudrix)
Circular Tractrix 극좌표 방정식
\(r = 2a \cos(t)\)
\(\theta = t - \tan(t)\)
\(a\): 줄의 길이
\(t\): 매개변수
Circular Tractrix 성질 (1)
점근원
반지름: \(r = \sqrt{R^2 - a^2}\)
곡선 패턴
\(a\)와 \(R\)의 비율에 따라 다양한 모양
Circular Tractrix 성질 (2)
Curve Stitching
접선들의 포락선(envelope)으로 아름다운 패턴 생성
역사적 배경
Euler가 처음 연구 (18세기)
Trudrix 소개
어원
라틴어 "trudere" (밀다) → Trudrix
정의
물체를 밀때 생기는 곡선
줄의 길이 a > 원의 반지름 R일 때 발생
Trudrix 특성
여러 개의 cusp(뾰족점) 생성
패턴의 닫힘 조건
\(m = \frac{a}{a^2 - R^2}\) 가 유리수일 때만 곡선이 닫힘
응용: 기계공학
Schiele Pivot
곡률 중심이 일정한 거리를 유지하는 특수 피벗 메커니즘
곡률이 유지되도록 일정하게 마모가 일어나게 함
케이블 추적
케이블이나 체인이 끌릴 때의 경로 예측
응용: 물리학
추적 문제 (Pursuit Curve)
물체가 다른 물체를 추적할 때의 경로
파동 전파
특정 조건에서의 파동 전파 모델링
응용: 미분기하학
Pseudosphere (위구면)
Tractrix를 $x$축 주위로 회전시킨 곡면
Beltrami가 연구
일정한 음의 가우스 곡률을 가지는 곡면 예시
Pseudosphere (위구면)
정의
Tractrix를 $y$축 주위로 회전시킨 회전면 (소용돌이? 블랙홀?)
가우스 곡률 \(K = -\frac{1}{L^2}\)
참고 문헌
Yates, R. C. (1959). The Catenary and the Tractrix. The American Mathematical Monthly, 66(6), 500-505.
Sharp, J. (1997). The Circular Tractrix and Trudrix. Mathematics in School, 26(1), 10-13.
Lockwood, E. H. (1967). A Book of Curves. Cambridge University Press.
감사합니다
Questions?